Home
Home

 Artists
Artists
 Search
Search
 Recent
Recent
 Random
Random
 Posts
Posts
 DMs
DMs
 Tags
Tags
 Random
Random
 Importer
Importer
 Import
Import
 FAQ
FAQ
 Account
Account
 Register
Register
 Favorites
Favorites
 Login
Login

Marlin on Two Boards? (Patreon)
Content
Until recently I only had one humble printer to work with: Millie, my trusty self-sourced Prusa i3. But a few months ago, when I was struggling with delta code I received the donation of an inexpensive "Micromake" deltabot from a very nice guy in Japan, who also threw in a portable oscilloscope and a pair of extra RAMPS boards for good measure. They have all turned out to be very useful in moving Marlin forward.
So, to you, Katsumi, I say "Dōmo arigatōgozaimashita!"
Your Mission, Should You Decide to Accept It…
Whenever we get a question, a feature request, or a bug report I try to make sure I fully understand the realm under discussion before I answer or take action. And yet, I always feel at some disadvantage, because once you go beyond the software logic there's a whole forest of micro-controller, electronics, engineering, and physics knowledge still just tantalizingly beyond my grasp.
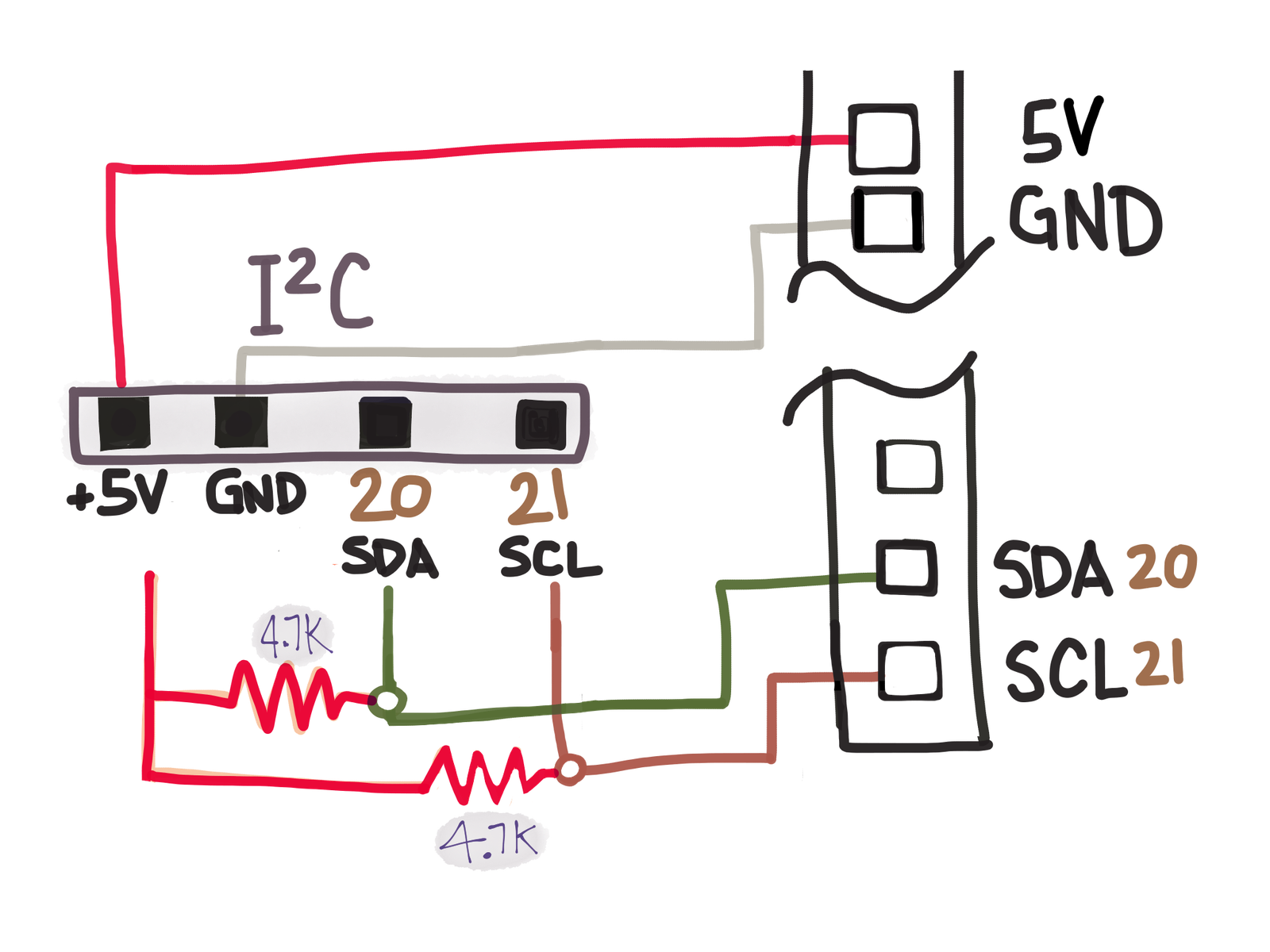
So it was with some trepidation that I agreed to help build a printer that would use a second RAMPS board to manage a 4-stepper Z axis, controlling it remotely with some kind of serial connection. I knew almost nothing about building such a setup, but I was sure that I could figure it out, given enough time. Fortunately for me, Marlin had recently acquired a feature called EXPERIMENTAL_I2CBUS. So I decided to make use of it and see if it could do what we needed.
As it turned out, it was almost trivial. Once I was able to get the two boards talking to one another it was just a matter of coming up with a nice light protocol to send commands to the "slave" and request a status byte. In the process I found that the existing feature needed a lot of debugging, but once that was done it … just … worked!
Sure, okay, there was a lot of crashing at first. But I love when things ultimately go so well.
With this first flush of success, I'm excited to try using this method to do other tricks, like offloading all the movement handling and sensor management to a second board, so the main board can just deal with the high-level stuff including the LCD controller.
As soon as I find the time, I will post an article to the Marlin website on this very interesting and useful topic.
That Release I Keep Promising…
At the moment I'm just about to unleash 1.1.0-RC8 onto the world. I know, I know. It's hard to believe! There are just a couple of relatively minor bugs to work out, but –seriously– it will be out this week. And this is going to be the very last release candidate too. I'll make a formal announcement as soon as it's done and I will post to all the usual places.
Documentation Time!
The next order of business, while we're getting your feedback on the release, is to fill out the documentation. The Marlin website is up and running, but it's still very sparse. No one, it seems, likes to write documentation. And frankly, I don't blame them, especially when I'm the editor-in-chief. I'm a real stickler for concise and clear language.
They say a picture is worth a thousand words, and when it comes to technical documentation about 3D printing, we know it's true. It will really help a lot if we have good images and examples. And it will be even better if we can supplement the site with good videos on subjects like configuration, bed leveling, and calibration. I would personally love to see more of this kind of content. It makes our job a lot easier if we can refer users to good documentation when they need help.
What's Next? Spoiler: 32 Bit!
Once Marlin 1.1 is out there, and while the documentation is taking shape, the next big task ahead of us is to get Marlin formally supported on 32-bit boards with ARM processors. There are a whole slew of 32-bit boards coming out, and we're currently in the process of acquiring some so we can start evaluating them.
There are already a couple of forks of Marlin that support Due and Duo boards. The best of the bunch will serve as our guideposts while we figure out the best way to structure the code and the Hardware Abstraction Layer (HAL). There's some talk of using a Real-Time Operating System (RTOS) too. I'll keep you posted as that takes shape!
Personal Status
For the last 4 months I've been in Austin, Texas working with MakerArm to get their machine up and running with Marlin. If you haven't seen their Kickstarter, take a look! They're building a robust SCARA robot arm with changeable toolhead to perform a wide variety of functions — not only 3D printing, but laser engraving, CNC milling, foam cutting, and pick-and-place. It's an ambitious project, but well on track to deliver, and I'm really learning a lot. Much of the recent refinement of Marlin has been in reponse to their needs.
They're a nice group of smart people, and while as a Kickstarter they can't afford to pay me a king's ransom they have been great hosts, making sure I don't freeze or starve while I code my days and nights away. I was pretty despondent before I came here, but time and busy-ness have started to bring me back around. I feel more able to start steering my life again.
The MakerArm project is pretty much my whole life (apart from Marlin itself, of course), and it's going to require a lot more time. So I'm headed back to Portland, Oregon in a couple of weeks to collect my 3D printers and settle my affairs, then I'm relocating to Austin for a while, at least until the project is complete. After that, who knows? I keep dreaming of places closer to the sea, and I understand that Santa Cruz has a burgeoning robotics scene.
As Always, Thanks for Participating
I'd like to give an extra-special thanks to all my patrons this month. Without you this project really would not be possible. As a result of this campaign I've met a lot of awesome makers, electronics gurus, 3D-printing enthusiasts, and people who are just excited and inspired by the potential of this emerging technology. I've said it before, and I'll say it again: It is you, the community, that keeps me coming back to the keyboard day after day to make Marlin better.
Keep doing what you do, and I'll see you in the virtual!
Files