Home
Home

 Artists
Artists
 Search
Search
 Recent
Recent
 Random
Random
 Posts
Posts
 DMs
DMs
 Tags
Tags
 Random
Random
 Importer
Importer
 Import
Import
 FAQ
FAQ
 Account
Account
 Register
Register
 Favorites
Favorites
 Login
Login

Tempest's Dispatches - Jan '22 (Patreon)
Downloads
Content
Hi Guys,
Thank you so much for signing up to support my work as a Benefactor. This is the first in what I plan to be a series of monthly posts about what I've been working on; basically a digest of my dev stream posts from the exclusive Benefactors' area on the Discord server. This will be the juicy early development stuff that I don't share elsewhere.
That's one way of looking at it. The other is that you get to see in real time how my creative brain basically functions like a bag full of cats and it's basically a miracle that I ever release anything!
(Edit 6-5-22: This post is now attached as a PDF if you want to see the pictures in context!)
Organic 3D shapes and future possibilities?
So the first thing I've been working on has been figuring out how to 3D print organic shapes, like for example models out of Virt-a-Mate. At first 3D model + 3D printer might sound like an easy combination, but I've bumped into a few issues. 3D models designed for computer graphics are very different to models you would want to make solid. The main difference is that they are designed to work with textures, so they will often have inconvenient extra layers, and of course they can get away with having a lot of flat surfaces because the images painted onto them hide it very well.
So if you want the experience where you take that curvy feminine object out of the virtual world and feel the shape of it in your hands you might end up being disappointed because the main thing that you feel is in fact... triangles. Lots of triangles. I discovered this when I exported a female VaM character, got it into Fusion360 (via Meshmixer) and I used vase mode on my 3D printer to print her midriff at life-size in two halves. It was actually quite pleasing to hold, but the flat triangles dominate the feeling of the surface texture.
On the plus side, it's probably invisible on radar.
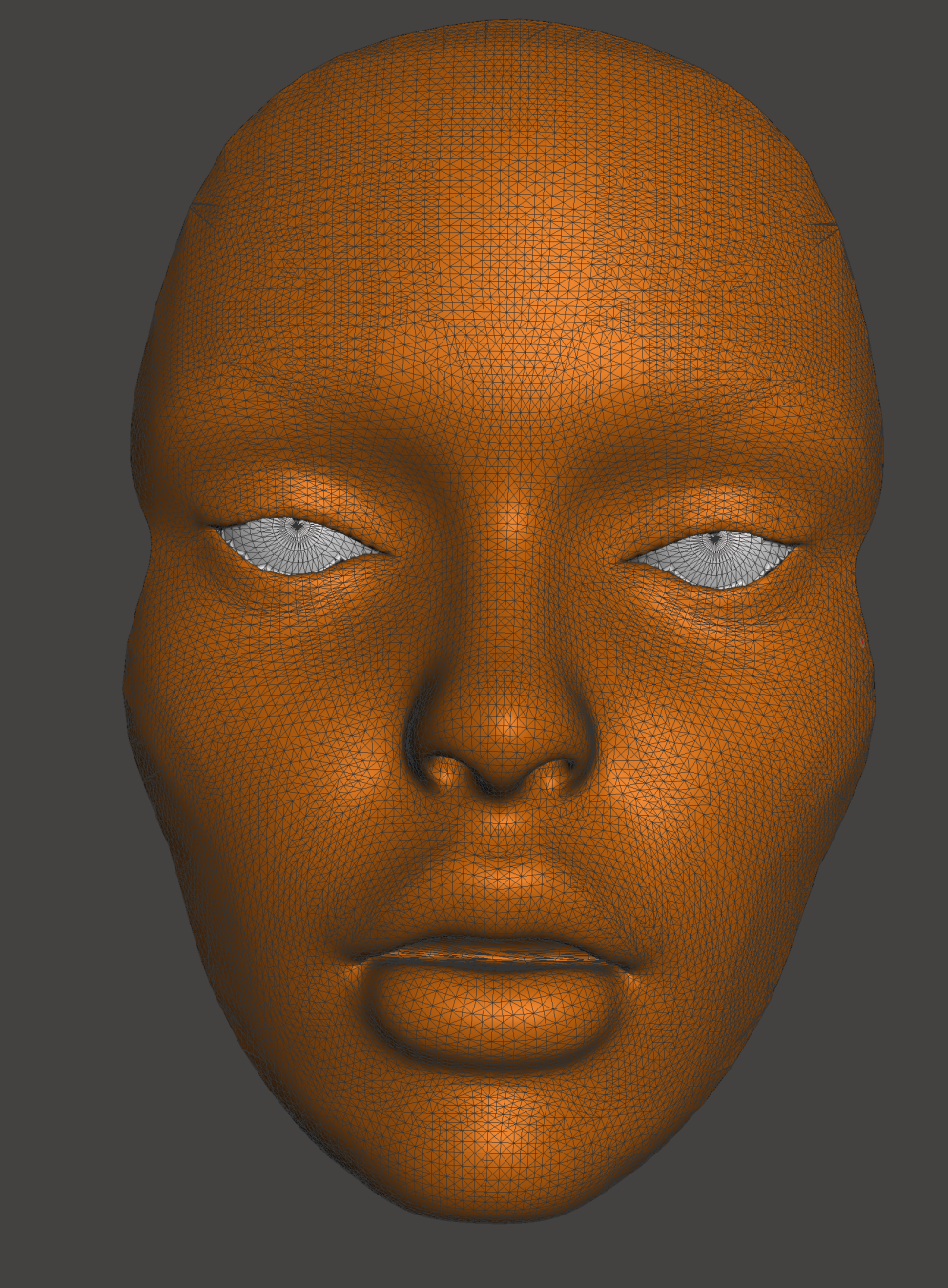
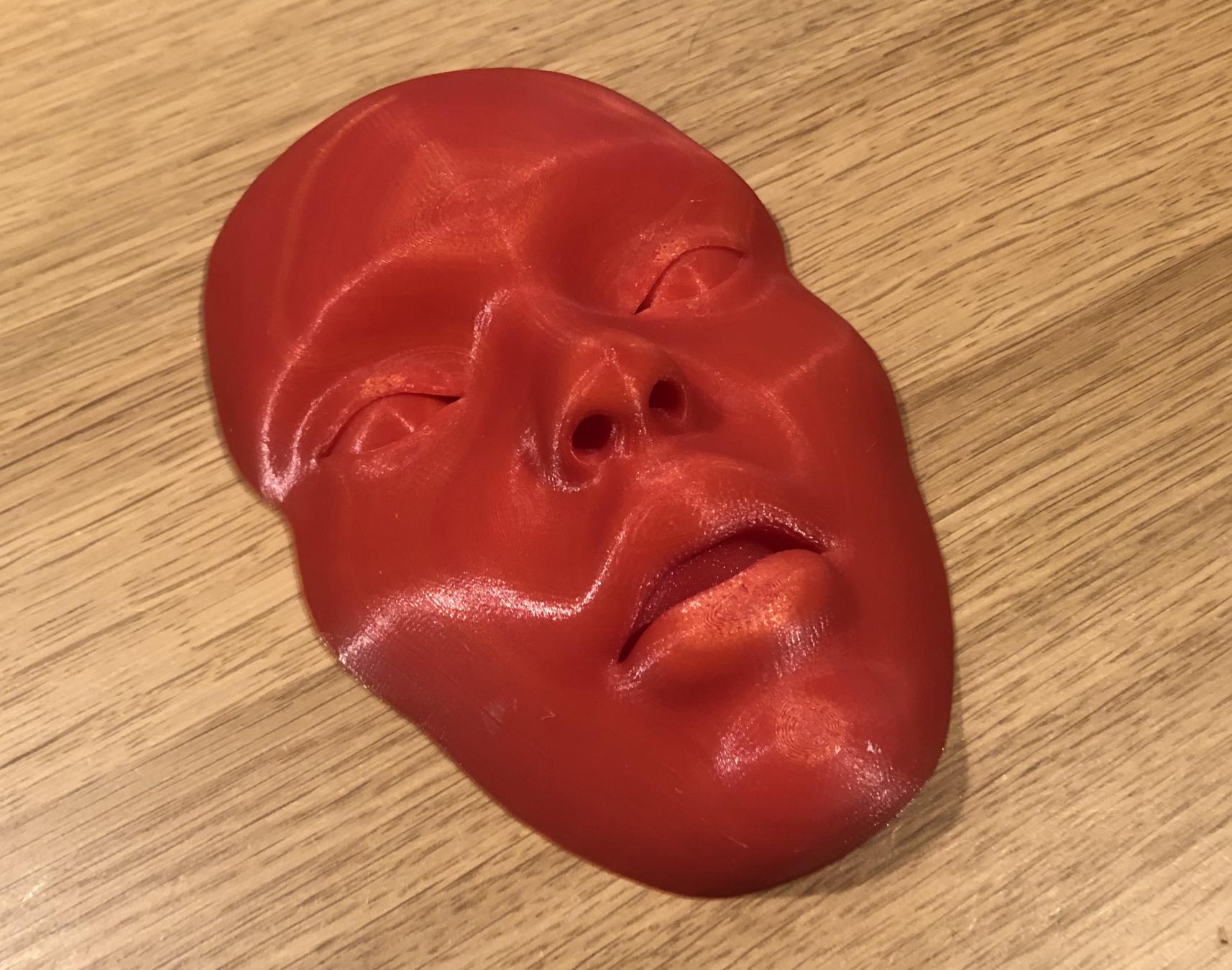
I also had a go at printing a face. This requires a lot more work because there are a large number of textured shapes that I had to remove for a viable solid model, including teeth, tongue, eyelashes, etc. With this I also started to use some of Meshmixer's tools to smooth out the mesh. What I want is a printed solid shape where the mesh is invisible.
I was actually very pleased with what came off the 3D printer. There was some surface roughness in the flatter areas mostly caused by having to print in this orientation but the shape was really organic and smooth and the triangles that made the shape were simply not visible. It gave me confidence that we can print very smooth, organic shapes in future.
So where am I going with this? Well, if you imagine a step up from Fleshlight launch to OSR2, then from OSR2 to SR6, what does the next step look like? I think that machine looks like a female lower half robot, or maybe something like a disembodied pair of cycling shorts that you can slip a fleshlight inside.
I have no idea exactly how that would look or work and we're a long, long way from me publishing the build plans for one, but it's a direction I want to explore. After all, there are people in the world who homebuild aeroplanes, so I don't think it's an impossibility in the future.
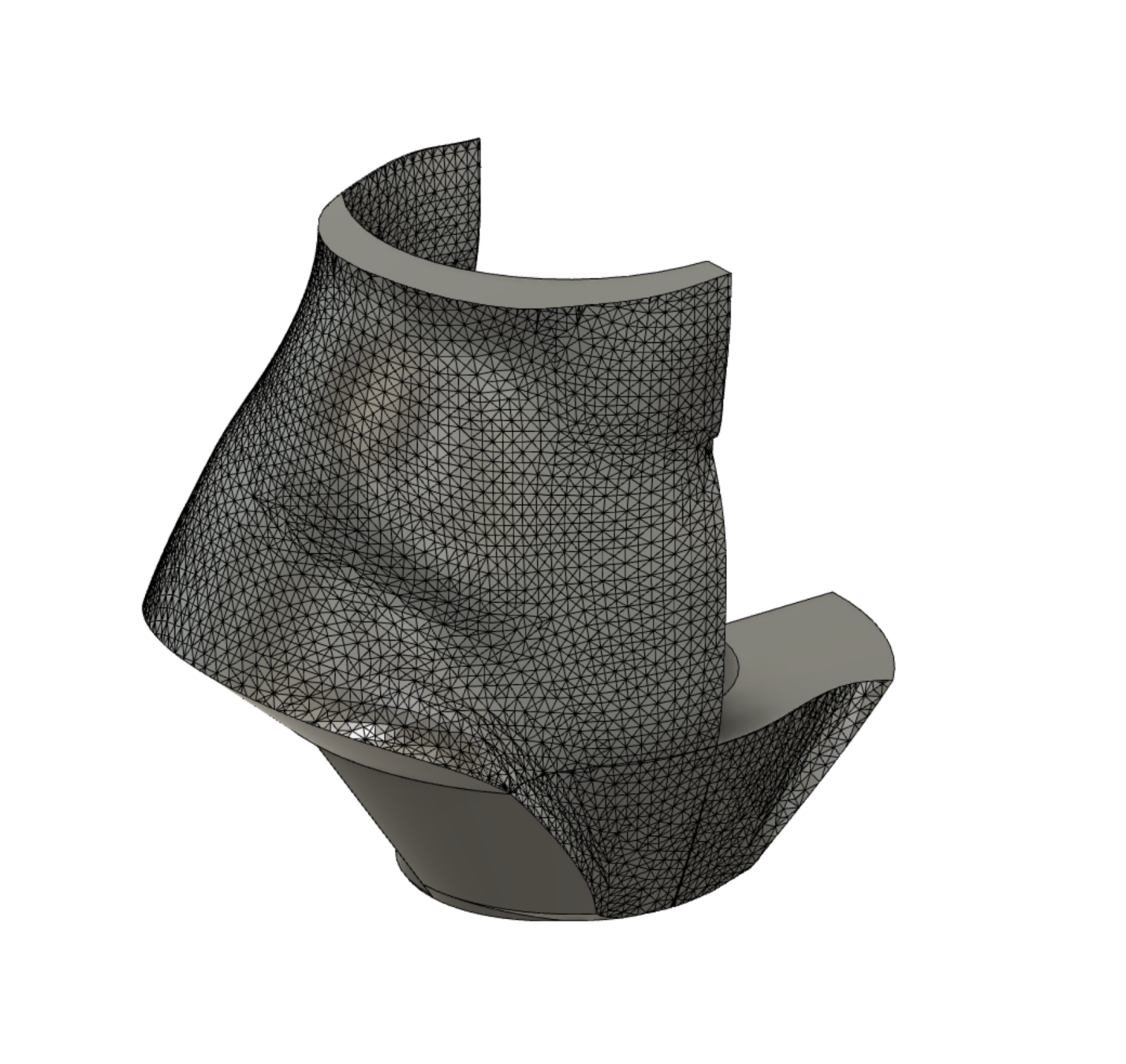
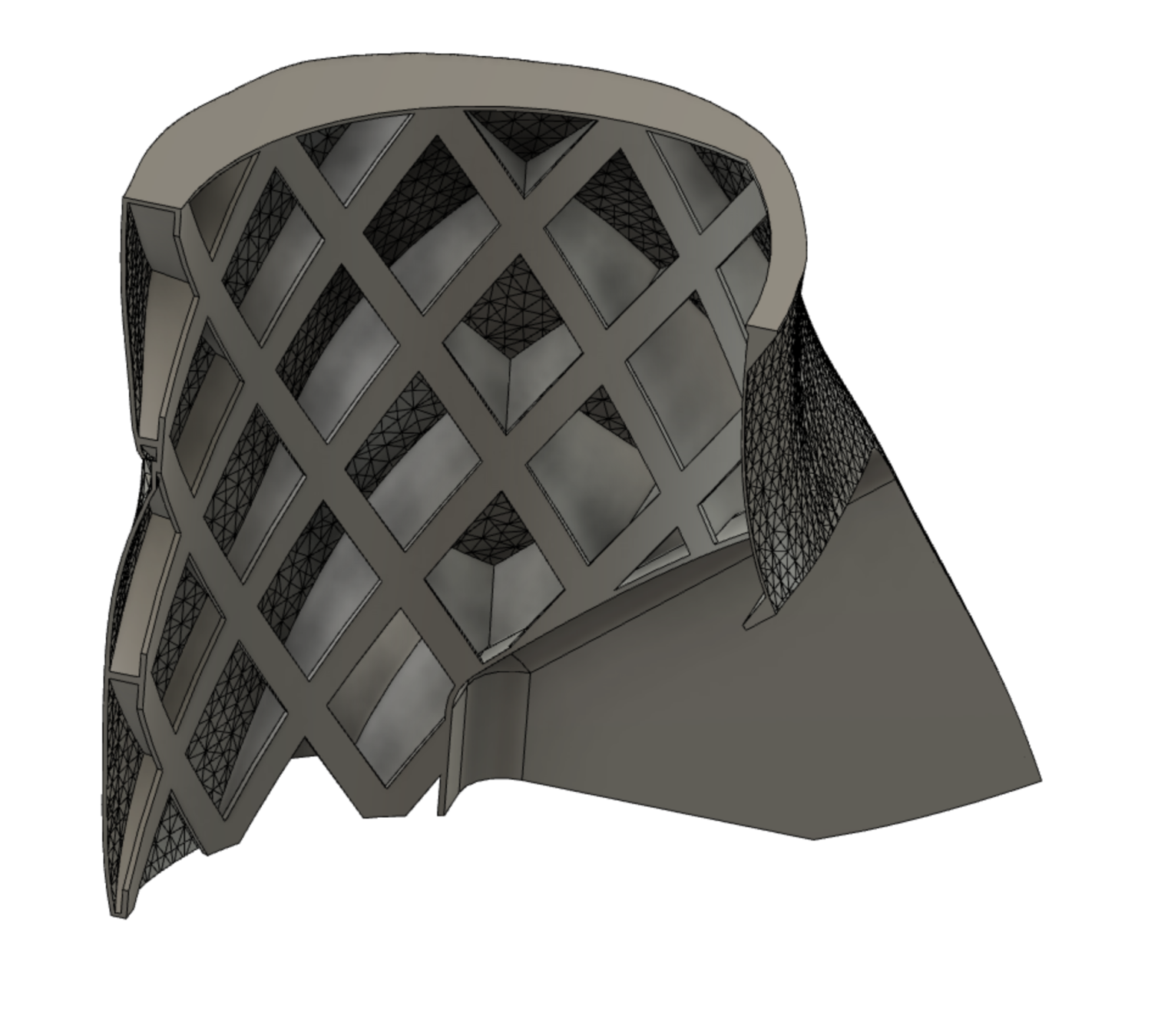
Short term I am going to try using some of these new ideas with SR6 and see what the community response is. I am going to incorporate the midriff model, complete with some quite enjoyable abs, into an alternative receiver for SR6.
The challenge with the SR6 is keeping the weight of these components down. The base part of this receiver shouldn't weigh much more than the standard receiver but the two "wings" need to be very lightweight but stiff structures. So far I think I'll be able to keep them under 150g each.
My intention is to release this to my Maker tier in the next month or two, once it's done.
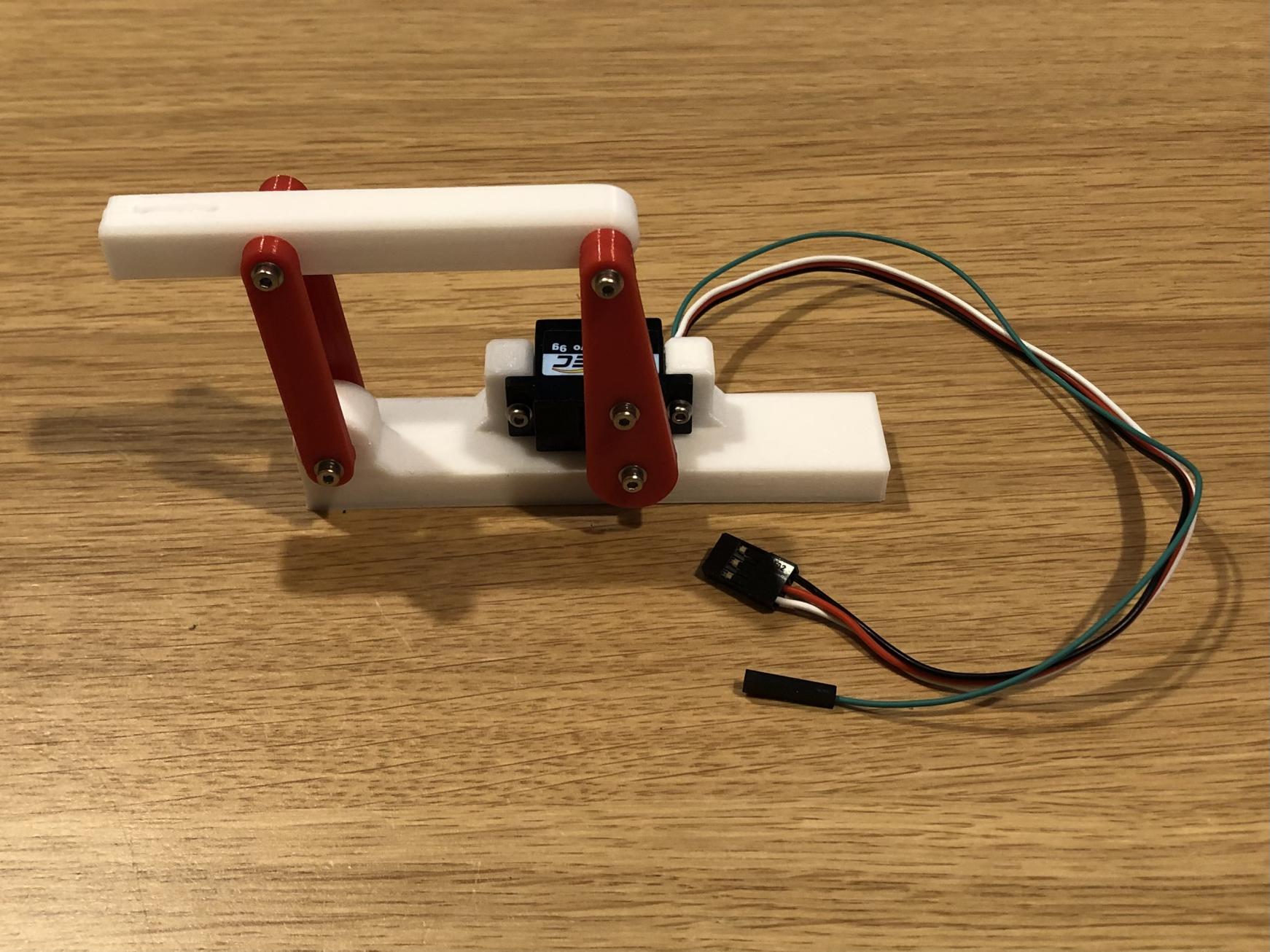
Remote squeezing mechanisms
I've been thinking for a while about the problem of actuating the squeezer mechanisms I've been working on - that is how to motorise them. The problem is adding the weight of extra servos on the receiver. The twist on its own isn't too bad, but an extra couple for two squeezing positions might be a bit too much.
Something that I'm going to look in to is mounting the servos elsewhere and linking them up to the receiver by other means. To that end I've bought in a couple of sets of bicycle brake cable and I'm going to be doing some experiments with this. I am always thinking about keeping any components as generic as possible, and I think this might work well.
Photo editing
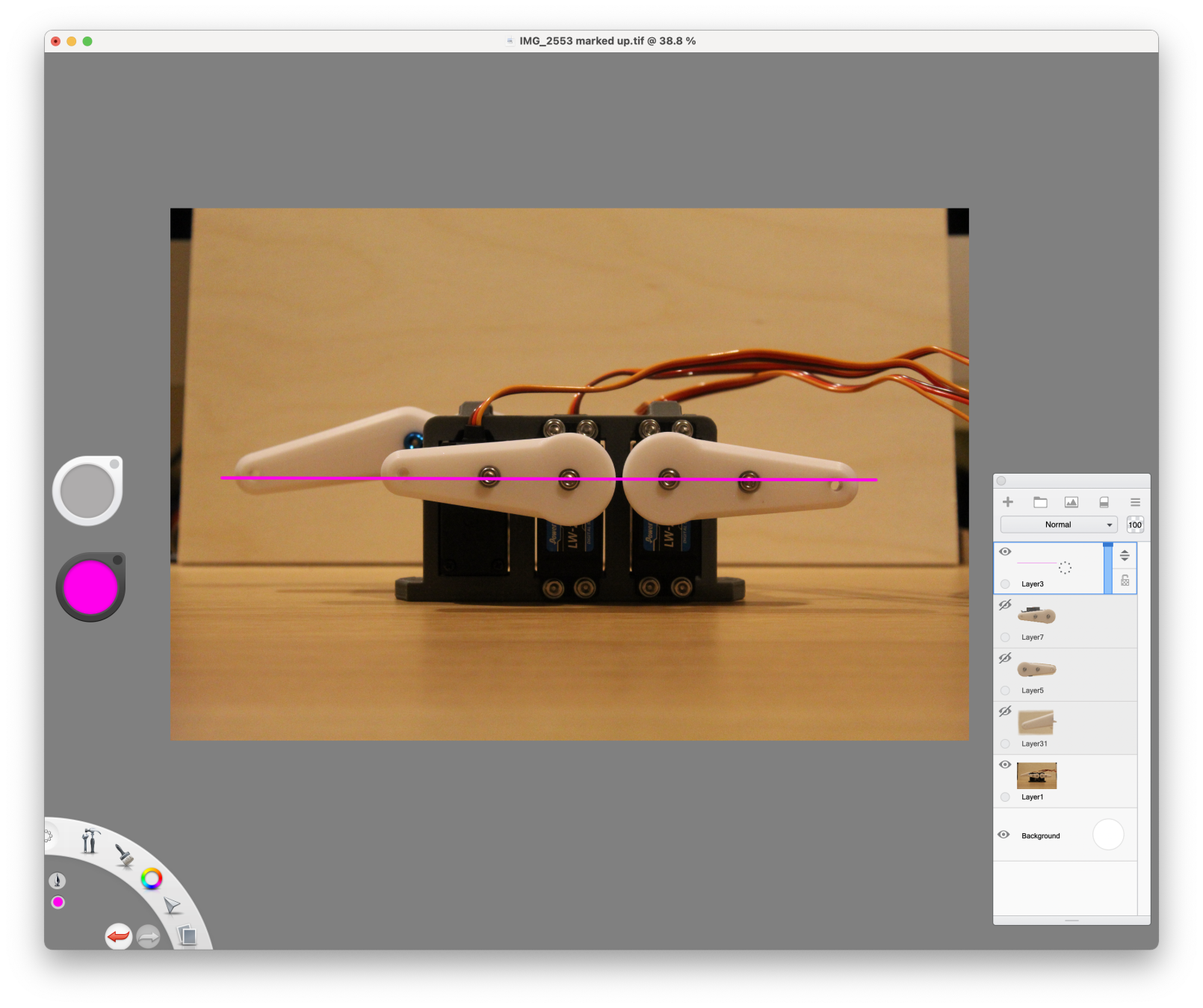
Those of you who have taken a look through my SR6 build plans, released yesterday, may have noticed that I was somehow able to line up the arms on my SR6 absolutely perfectly in the photograph where I illustrated the correct calibration positions.
I could have achieved this by a lengthy process of adjusting the servo zeros in the firmware. As it was, I just cheated and zeroed the arms in photo editing instead. I have to say I am quite enjoying learning this new skill
Touched by a robot?
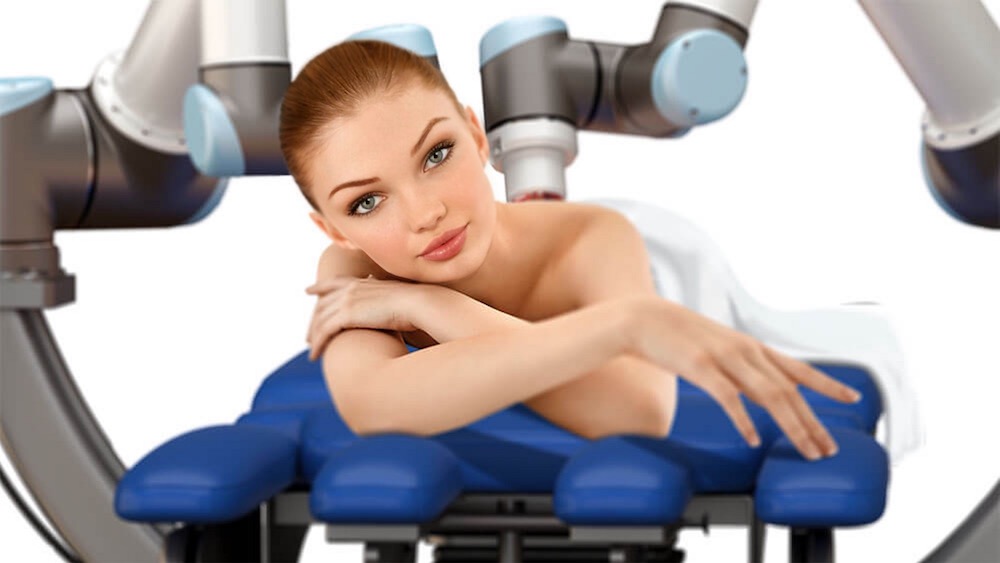
Lastly, I recently watched a video on YouTube that gave me some interesting ideas. There's a startup company that has built a robot for massaging the buttocks, legs and shoulders of beautiful athletic women in yoga pants. Apparently various massage "attachments" are available. Needless to say I am fully in favour of this particular science fiction future.
Just for fun, I've added an edited image of Ren's VaM Character Jessica enjoying the massage robot.
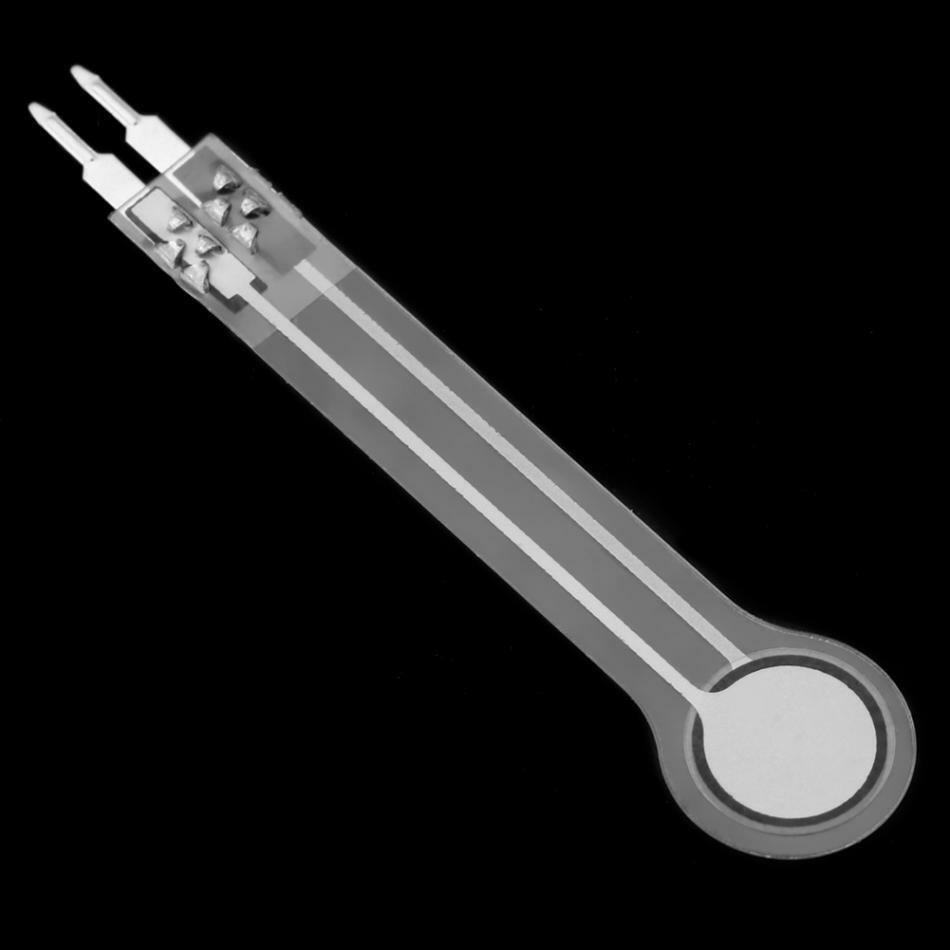
What got me thinking though was that the robot they're using isn't going clever stuff with cameras and position tracking, etc. What it's doing fundamentally is applying a calibrated amount of force. It got me to wondering whether I could replicate that effect with a much less expensive setup.
I ordered a simple arduino-compatible force sensor and I've been doing a few experiments with it. The wiring required is extremely simple. I just need to find out if the sensor resolution is good enough for what I want to do. The next thing is to put the sensor on the end of a simple motorised arm and see if I can use sensor feedback to effectively control the position and deliver a specified amount of force.
What am I thinking here?
You may recall a while back I was asking whether there would be any interest in a machine that would work for women. Well, the obvious female equivalent of one of my stroker robots would be some kind of F-machine. The thing is though that there are already other people building those.
What I want to try is something very different, and a lot more subtle. Let's call it some kind of hands free 3-axis intimate massager. It might well also work for men of course. I already have a bunch of ideas for it, but much will depend on whether I can get this force-feedback tech to work reliably with homebuild components.
As with all of these projects the lessons I learn trying to make it work might be more valuable of course.
Finally...
The last thing I want to say is that I've created a hangout channel on the discord server. It's similar to Tempest TV but a lot more exclusive. Because you are currently a very small number of individuals I haven't scheduled any livestreams yet. What I am going to do for the time being is keep posting short video clips of what I'm doing in the dev stream.
If however there is something specific you would like me to discuss then do send me a message. I can either arrange a time to go live and discuss it or I can record a quick video and post it up there.
Thanks again guys!
Tempest
Files