Home
Home

 Artists
Artists
 Search
Search
 Recent
Recent
 Random
Random
 Posts
Posts
 DMs
DMs
 Tags
Tags
 Random
Random
 Importer
Importer
 Import
Import
 FAQ
FAQ
 Account
Account
 Register
Register
 Favorites
Favorites
 Login
Login

November Release - SR6 Bearing Links (Patreon)
Downloads
Content
Hi Guys,
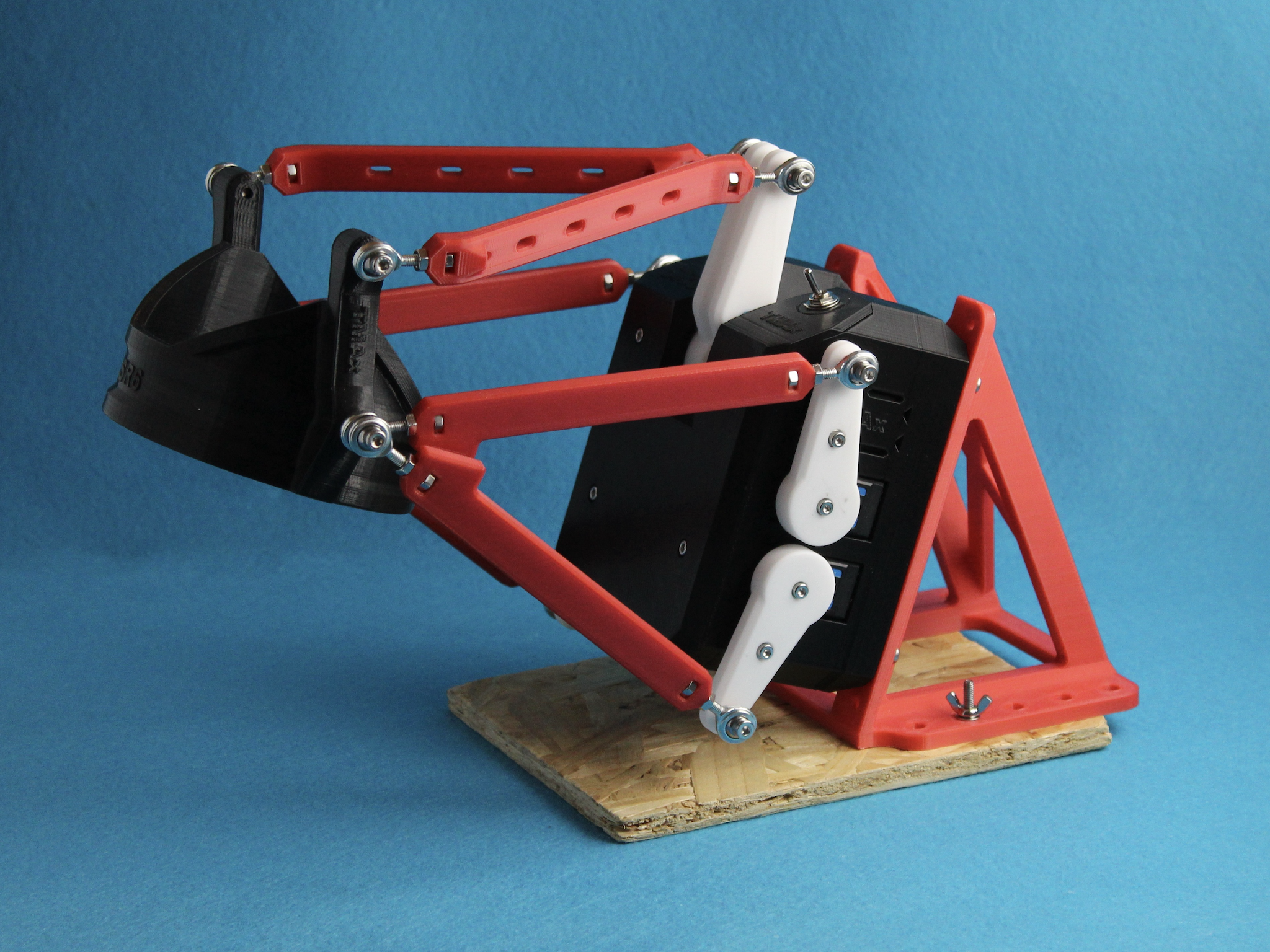
It's time for this month's $8 tier release, which is an upgrade for the SR6. This is a new set of links for the SR6 that use bearings instead of the old wiring grommets.
Whenever I produce a design I generally have two rules: keep the design as simple as possible, and only use parts that are easily available. Yes the design might be twenty times better if I use a Brit-Tech Hyperwidget Doodad 4000, but if you guys can't get your hands on a bag of them then that doesn't do anybody any good. This was the main reason that I used wiring grommets for the flexible joints on the OSR2, and later the SR6. They might not have been sophisticated, but they do the job pretty well and more or less everybody seems to be able to get hold of them.
Recently I have realised that Rod End Bearings (aka "Fish Eye Bearings" or "Rose Joints") are actually relatively easy to get hold of and are fairly standardised in size and shape. It therefore seemed obvious to me to incorporate them into the SR6 design, and the results have been very pleasing. The biggest advantage is that whilst the wiring grommet joints had a millimetre or two of wiggle room the bearing joints have practically zero play in them. This makes the movement of the robot a lot sharper.
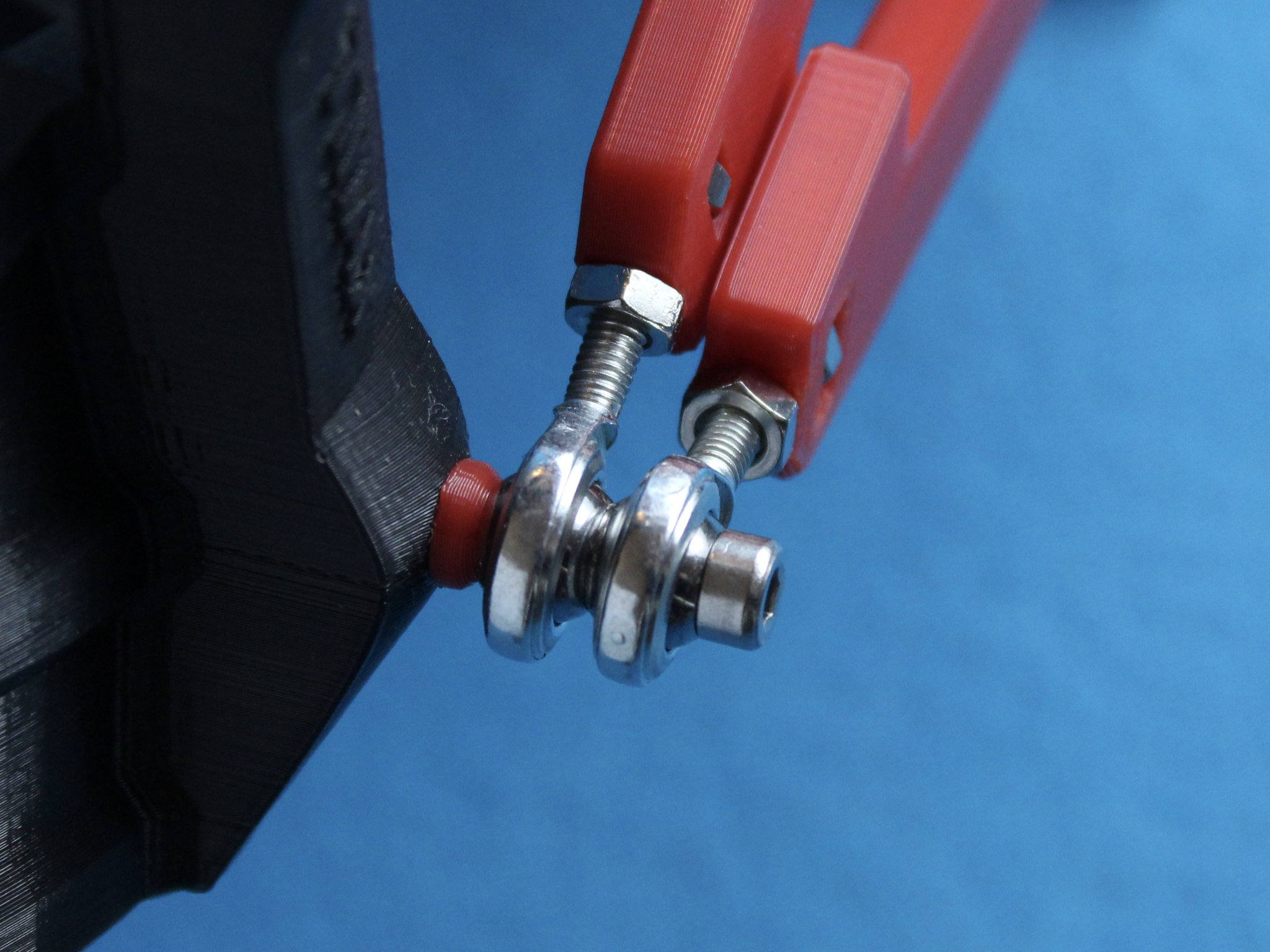
This release has new STL part files for the SR6: Main Links and Pitcher Links. These are to be used with Male M4 Rod End Bearings (12x). The M4 type has a 4mm hole through the bearing and a standard M4 thread on the shaft. Each bearing is held in place on the end of the arm by a pair of M4 nuts (24x nuts total). For each bearing one nut sits in a slot inside the link and the other is tightened up to secure the bearing in place. This arrangement seems to hold everything together very well.
(I have already had a request for a design that will work with female rod end bearings for those of you who are having trouble getting hold of the male type. I've got some female bearings on order so that I can do that in the near future.)
The Main Arms feature a little tab on one end. This is to create a permanent overlap to prevent the links clashing with each other as they are scissored together when the device moves. The pitcher links have cut-outs through them, which are there should you want to tie the wire harness (for the twist, valve, etc) to them.
Finally, in order to get the required range of motion out of these bearings I have had to use a custom spacer on each joint. I am including the part file for this and you will need 10x of them: one for each mounting bolt with pointy end toward the bearing. Ultimately I want to eliminate these via design tweaks to the arm and receiver models, but this solution works well for now.
Let me know what you think about these guys. At the moment I'm thinking that I will make rod end bearings the default on the SR6 Beta, but I'm always open to feedback.
Enjoy!
Tempest
(The files are protected with the november password because of an ongoing Patreon security flaw. Check your email. As a $8 patron you should have received the password separately, but feel free to contact me if you have any trouble. The files are also available on my discord server.)
Files