Home
Home

 Artists
Artists
 Search
Search
 Recent
Recent
 Random
Random
 Posts
Posts
 DMs
DMs
 Tags
Tags
 Random
Random
 Importer
Importer
 Import
Import
 FAQ
FAQ
 Account
Account
 Register
Register
 Favorites
Favorites
 Login
Login

A.R.C. Hanger Redesign mechanism closeups (Patreon)
Content
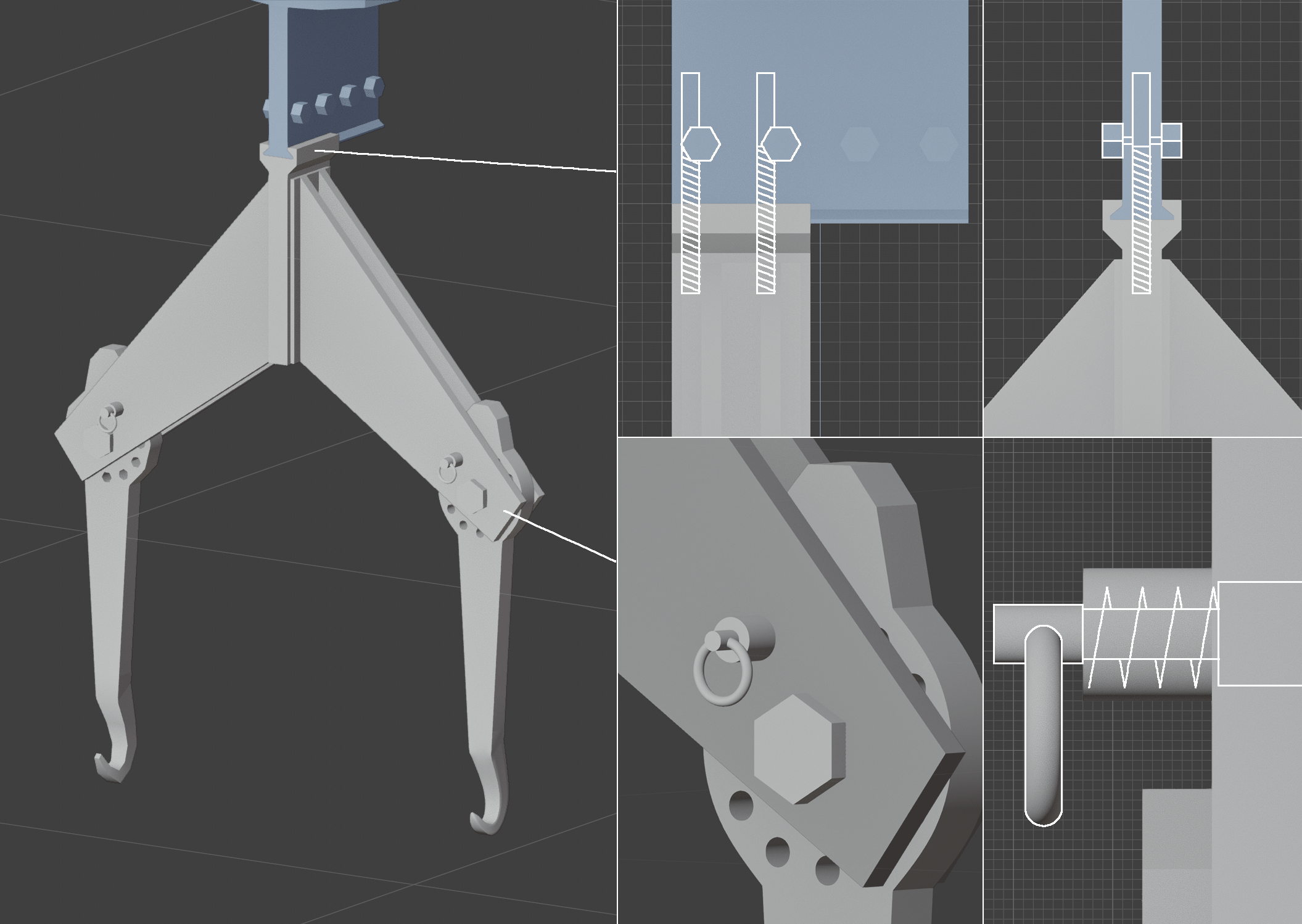
The shoulder section is isolated in this view. The hanger attaches to the connector on a rail similar to a Picatinny or Weaver rail, except this has no recoil grooves and the cross section is a little different.
Internal mechanisms shown in white.
Each attachment slides onto the rail until it lines up with the screws that are inside the connector (blue.) Then these screws are screwed in to the attachment as shown, firmly joining the two. The screws are operated on either side by the linked hex-bolts and turned by a driver with hex attachment, mounted on the end of a robot arm.
I haven't designed an actual way to transfer the rotational motion from one axis to another in such a small space, but again, that will never be seen so I will leave it unmodeled and undesigned.
The hook-arms can be adjusted in 30° increments , locked by a spring loaded captive pin. A robot claw can easily grab the ring and pull it out to adjust the angle on the arms.
Files