Home
Home

 Artists
Artists
 Search
Search
 Recent
Recent
 Random
Random
 Posts
Posts
 DMs
DMs
 Tags
Tags
 Random
Random
 Importer
Importer
 Import
Import
 FAQ
FAQ
 Account
Account
 Register
Register
 Favorites
Favorites
 Login
Login

Annonce: Sweetie Bot Control software (Patreon)
Content
We've put a lot of effort into it. It's one of the most difficult part of the project. You know, without the software Sweetie Bot is only a doll.
Of course, it will be Open Source (we chose a BSD license), that means everyone can download it and try it oneself. It's necessary if we want more developers to join us in the future.
And here we have a small teaser: "sweetie_bot_proto2_description" package! https://gitlab.com/sweetie-bot/sweetie_bot_proto2_description
What is it?
The control system should work with almost every robot, because we try to keep it universal.
But you need to "teach" it, "show" it a robot with whom it will work.
This software should get all the necessary information about the robot.
How many joints it has, and where are they located? Which angle they can turn? What geometry has the robot body? What is the mass and inertia of each joint? And so on.
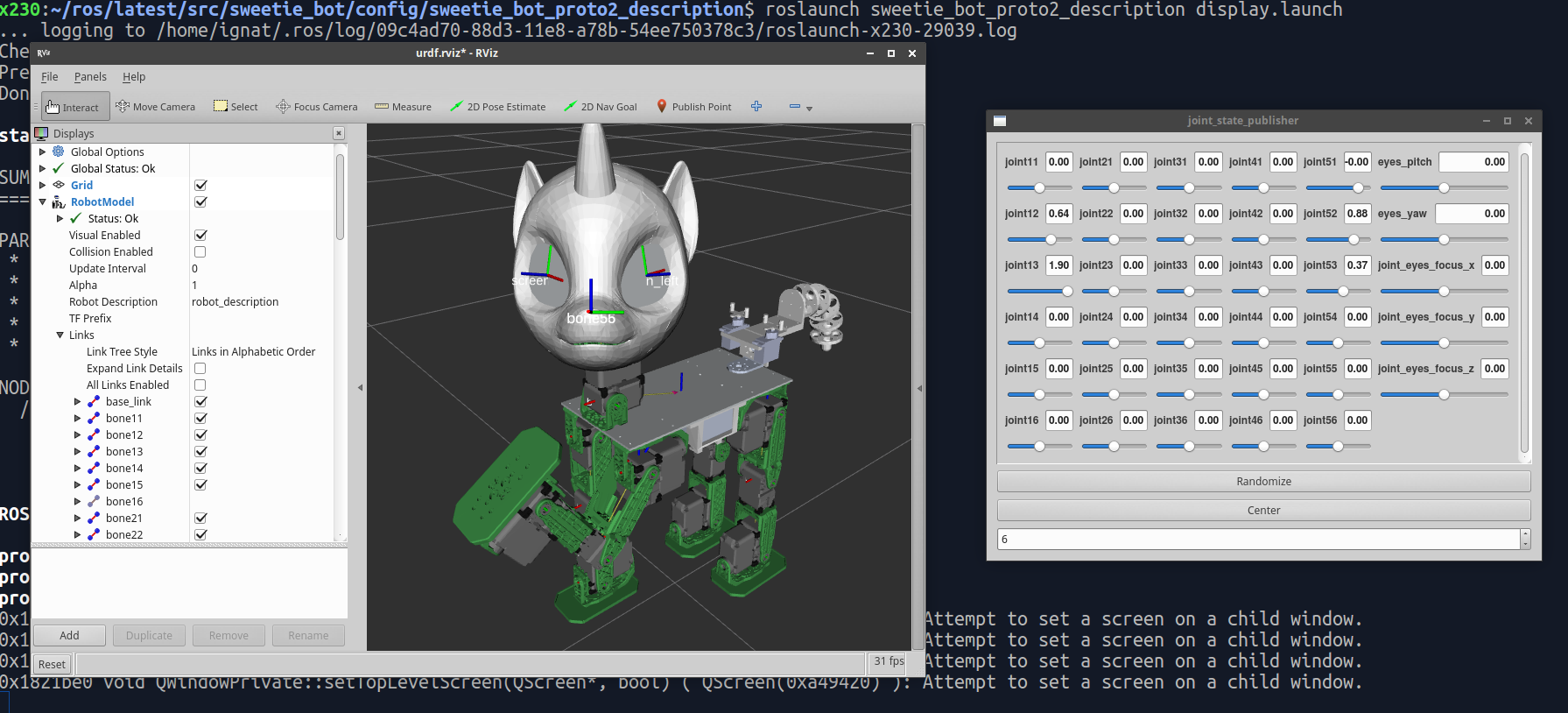
This URDF 3d model is designed to answer all these questions.
You can download and try it yourself. You can view the model alone, even without the rest of the software. To do that you need linux and Robot Operation System installed (lunar or melodic recomended)
First you need to create the ROS eviroment:
$ source /opt/ros/<distro>/setup.bash
$ mkdir -p ~/ros/sweetie_bot/src/ && cd ~/ros/sweetie_bot/src/
clone the description to it:
$ git clone git@gitlab.com:sweetie-bot/sweetie_bot_proto2_description.git
$ cd ~/ros/sweetie_bot
$ catkin_make
$ source ~/ros/sweetie_bot/devel/setup.bash
Run:
$ roslaunch sweetie_bot_proto2_description display.launch
Files